![]()
INTRODUCTION
Overview
Download and Install
Documentation
Publications
REPOSITORY
Libraries
DEVELOPER
Dev Guide
Dashboard
PEOPLE
Contributors
Users
Project
Download
Mailing lists
Principles of Project Operation
We hope that this project will attract a diverse group of developers. If this happens we think that a clear set of written down rules would help to avoid misunderstandings.The rules on the pages are brief. We also maintain a page with more practical instructions and a guide to common practices.
Table of contents
1. Tools
- Build system
- Revision control system
- Unit test system
- Documentation
- Hosting service
- Bug Tracking
2. Project Operation
2.1 Source code life cycle
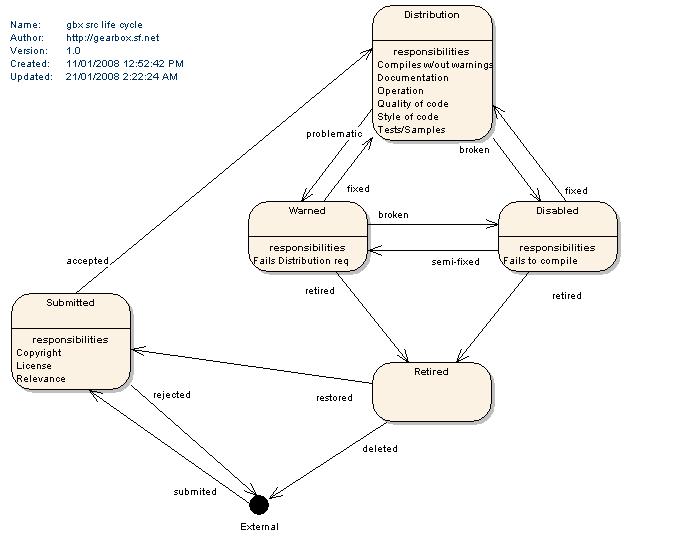
2.1.1 Criteria for submission
- Relevance
- License
- Copyright
2.1.2 Criteria for acceptance
- Documentation
- Tests and sample code
- Programming style
- Compilation
- Operation
2.1.3 Criteria for a warning
Failure of any in 2.1.2 Criteria for acceptance.2.1.4 Criteria for disabling
- Compilation
2.1.5 Criteria for retirement
- Compilation
- Other
2.2 Release of source code
Regular frequent releases every 1.5-3 months.2.3 Ownership of source code
Copyright belongs to authors and major contributors. The copyright is recorded in a comment block at the top of every source file. It is up to the current copyright holders to distinguish between "major" and "minor" contributions.3. Freedoms
Aside from complying with Sec.2, the designer of every module within the project is not constrained in any way. We specifically mention several important freedoms:- OS, compiler, programming language. New contributor's responsibility is to make sure that the new addition does not break the existing code.
- code design, e.g. whether or not to use C++ exceptions.
- dependencies
- data types used by libraries.
Appendix A. Programming Style Description.
In the case of not using a well-known, named style, contributors must describe the programming style in sufficient detail for others to be able to adhere to it (assuming, of course, that others are also capable of looking at the code for details). An example of what is necessary for C++ is given below.
- Naming conventions
- variables, member variables, classes, structs, namespaces
- functions, member functions
- #defines, enums
- filenames
- API usage style
- Units and coordinate systems
